Robots that look like humans
A brief look into humanoid robotics
This article provides a brief overview of the technology of humanoid robots. First, historical development and hardware progress are presented mainly on human-size full-body biped humanoid robots, together with progress in pattern generation of biped locomotion. Then, «whole-body motion» – coordinating leg and arm movements to fully leverage humanoids’ high degrees of freedom – is presented, followed by its applications in fields such as device evaluation and large-scale assembly. Upper-body humanoids with a mobile base, which are mainly utilized for research on human-robot interaction and cognitive robotics, are also introduced before addressing current issues and perspectives.
Keywords: humanoid robots, robotics, biped humanoids, Humanoid Research Project, human-robot interaction.
Introduction
Humanoid robots (or simply humanoids) is often used to refer to robots whose shape is close to humans. However, this definition varies depending on people: some say that a humanoid should have a «full body» including two arms and legs, exactly like a human, but others focus more on its communication or task capacities and extend the definition to a wheeled mobile robot that has an «upper body» including a head, a torso, and two arms. This article intends to cover research on humanoid robotics in a broad manner in order to provide the global trends in the research in this field.
Biped humanoids and their history
A humanoid robot by its most strict definition is an actuated human-size biped robot with a torso, arms, and a head, designed to achieve some of human capabilities. Let us start discussing this type.
«Humanoid is often used to refer to robots whose shape is close to humans»
It is agreed that Japan was leading research on humanoid robots until around the early 2000s, whereas these are now intensively studied almost everywhere in the world. The earliest humanoid that was academically reported is Kato’s WABOT-1 (WAseda roBOT-1) that can walk, recognize an object, and manipulate it by hands (Kato, Ohteru, Kobayashi, Shirai, & Uchiyama, 1973) (Figure 1a). The walk is «quasi-static», namely a stable walking motion that always keeps the total centre of mass inside the support polygon formed as an outer contour of the foot (or feet) touching on the ground. Although it could perform only in slow motion, it is anyway amazing that such a complete humanoid robot had already been developed more than 40 years ago. In those early years, mainly due to limited technologies, many people did not believe in humanoid robots, which were still regarded as science fiction.
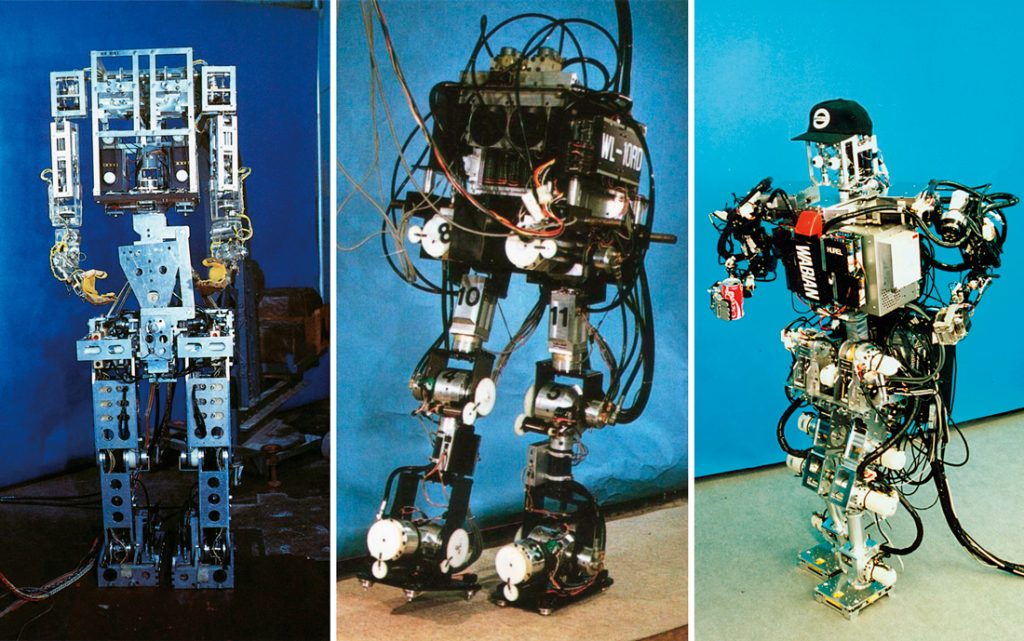
Figure 1. Humanoid robots developed at Waseda University (Japan), where the first humanoid was created in an academic environment. Until the early 2000s, Japan led humanoid robots research. From left to right: a) WABOT (WAseda roBOT); b) Waseda Leg (WL-10RD), and c) WABIAN (WAseda BIpedal HumANoid).
Some researchers continued working on dynamic walking of biped robots together with hardware development. Professors Takanishi and Yamaguchi from the Waseda University in Japan develop WL (Waseda Leg) and WABIAN (WAseda BIpedal humANoid) humanoid series (Figures 1b and 1c) that can walk by ensuring dynamic stability with upper-body motions based on the control using the concept of zero moment point (Vukobratovic & Borovac, 2004), which can be regarded as the dynamic version of centre of mass. Especially during rapid dynamic motions, the robot does not fall as long as the zero moment point is inside the support polygon even though the centre of mass goes out of it (Figure 2).
Meanwhile, Honda R&D had launched a secret project on humanoid robots in 1986 and unveiled P2 (Prototype 2) humanoid robot in 1996 as a result of ten years of hidden research. P2 is an autonomous humanoid that is 1.82 m tall and weighs 210 kg, capable of walking through wireless remote control, going up and down stairs and pushing a cart. Its sudden appearance was a total surprise and a brutal shock to many researchers, but had a positive impact to encourage them to push forward the humanoid research for realistic applications and to show that humanoids were no more science fiction.
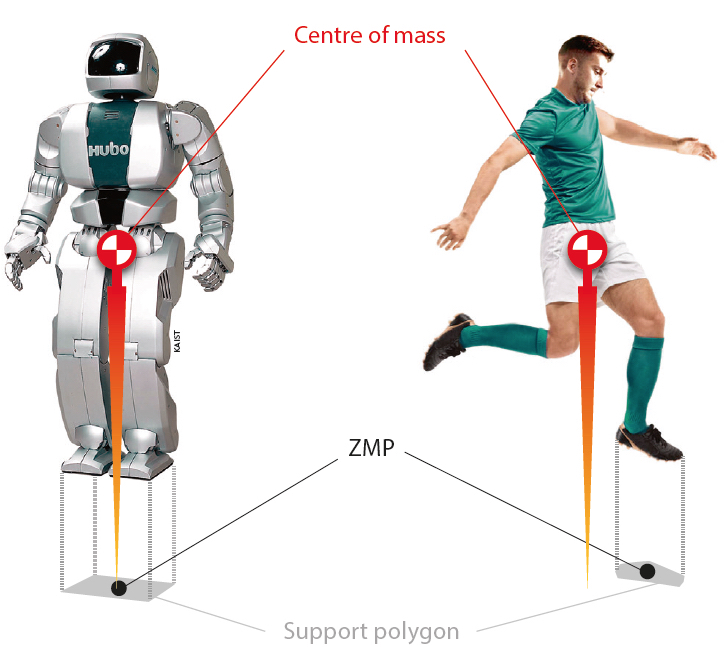
Figure 2. In a quasi-static movement, the robot always keeps the total centre of mass inside the support polygon formed as an outer contour of the foot (or feet) touching on the ground. As dynamic walking motions were developed for bipedal robots, the concept of zero moment point (ZMP) emerged. This point can support more dynamic movements (like the human figure in the picture) even when the centre of mass goes out of the support polygon.
Soon after in Japan, a national project called HRP (Humanoid Research Project) was started with Honda as a partner among other private companies, in order to develop humanoid robots that can coexist in human society and collaborate with humans. Honda continued to evolve their humanoid robots into Prototype 3 and finally ASIMO (Advanced Step in Innovative MObility) that can hop and run, pour tea into a cup, and charge its battery by itself (Figure 3). The HRP project finished in 2003 with HRP-2 (Figure 4a) as a result of hardware development. During this period, walking pattern generation of biped walking was established. Japanese engineer Shuuji Kajita and his team applied preview control or model of predictive control to compute the dynamic walking motion from the desired zero moment point trajectory, derived from desired footsteps, based on a simplified linear inverted pendulum model (Kajita, Hirukawa, Harada, & Yokoi, 2014; Kajita et al., 2003). As a result, the preview control allows generating the centre of mass velocity online by taking into account future evolution of the zero moment point through the model predictive control, which results in smooth walking motions. This method is generalized based on an optimization technique (Wieber, 2008) to bind the zero moment point in a designated area within the support polygon. Although the linear inverted pendulum model is quite simple, it is demonstrated that a practical dynamic walking pattern can be generated through a model of predictive control, which is considered to be one of the standard methods for biped locomotion generation.
Follow-up projects of HRP produced hardware platforms such as HRP-3, with a tough structure for industrial use, and Cybernetic Human HRP-4C, with a shape closer to human’s for entertainment uses, as shown in Figures 4b and 4c.
«Some people say that a humanoid should have a “full body”, exactly like a human, but others focus more on its capacities»
One important lesson learned from HRP and the following projects is the importance of the shared platforms. HRP-2 and iCub platforms have been utilized in a number of different universities and institutes, which allows sharing the development load and results. Accompanying common software, development platforms – often open-source ones like ROS and Gazebo, YARP and Choreonoid – play an important role as well for the researchers and engineers because they allow them to share and exchange their newest software. For instance, the installation of HRP-2 in the Laboratory for Analysis and Architecture of Systems at the Centre National de la Recherche Scientific, in France, triggered collaborative research on humanoid robots involving many European institutes through EU projects, leading to many joint publications (Yoshida, 2009). Since mid-2000s, different full-size humanoid robots have been developed including WABIAN-2, TORO (Figure 5a), Hubo (Figure 5b), iCub (Figure 5c), and Talos, some of which are also used as research platforms for joint research.
Small-size biped full-body humanoid robots have also been developed in the meantime. Representative examples of such robots are HOAP-3 (Fujitsu), QRIO (Sony), and NAO (Softbank Robotics), some of which have been commercialized and widely used as a platform. The advantages of those robots are their affordable price and easy setup of experiments with less concern about severe damages even after falling. Their capacity of whole-body expression and sensor-based interaction can also be utilized for research on human-robot interaction and cognitive robotics described later in the article.

Figure 3. The ASIMO humanoid was developed by Honda R&D within the Humanoid Research Project framework, created in Japan in the late 1990s and early 2000s to build humanoid robots that could coexist and collaborate with humans. / Wikipedia
Whole-body motion and applications
As of year 2005, just after HRP, the expected features of humanoid robots were: 1) the shape itself is useful, 2) humanoid robots can use tools for humans as it is, and 3) humanoid robots can work in the environment for humans as it is (Goswami & Vadakkepat, 2019; Kajita et al., 2014). More than ten years have already passed, and to our amazement most of this prediction is becoming reality as presented later. The basic technology expected to allow those applications is a «whole-body» motion planning and control that generates not only biped locomotion but also coordinated movements involving all the limbs, possibly reproducing human motions or contacting to the objects or environments with multiple points.
A typical application of feature 1 is entertainment use or digital archive of intangible cultural heritage. Cybernetic Human HRP-4C (Kaneko et al., 2009) has been utilized as a dancer or a master of ceremony in event shows. Another example is digital archive of traditional culture in danger of disappearing due to lack of successors. Japanese researcher Shin’ichiro Nakaoka and his team demonstrated that the humanoid robot HRP-2 can reproduce dynamic human motions of traditional Japanese folk dance, which shows the possibility of using a humanoid as an instructor of different traditional cultures by archiving and reproducing motions (Nakaoka, 2005). On the other hand, a team lead by Sylvain Calinon and Aude Billard proposed a method for imitating human motion based on a statistic framework called «Gaussian process» modelling human motion generation (Calinon, D’halluin, Sauser, Caldwell, & Billard, 2010).
Another emerging application for humanoids taking advantage of their human-like shape is the evaluation of wearable devices on them instead that on human subjects (Miura et al., 2013) by making a humanoid robot that has a shape and structure close to a human reproduce various measured users’ motions based on an advanced technique retargeting that transforms humans’ motions into humanoids’ (Ayusawa & Yoshida, 2017). This application is expected to bring several advantages to solve issues in human experiments: quantitative evaluation of supportive effect as opposed to subjective questionnaires, clearing heavy ethical procedures, and high repeatability in situation close to real use. Figure 6 shows an example of such an application in which the humanoid robot HRP-4 wears a powerful wearable supportive device called «muscle suit» (Kobayashi, Aida, & Hashimoto, 2009) and evaluates its supportive torque (Ito, Ayusawa, Yoshida, & Kobayashi, 2017).
«Japan was leading research on humanoidrobots until around early 2000s, but now they are studied almost everywhere in the world»
Before discussing the other features (2 and 3), I would like to mention an important incident that changed almost completely the landscape of humanoid research. When the great earthquake struck the Tohoku area of Japan and caused severe accidents in Fukushima Daiichi nuclear power plants, the humanoid robots presented earlier could not be put into practice neither to look for buried victims in rubbles nor to perform critical operations instead of humans in hazardous radioactive environments. Despite their disappointment, this tragedy drove researchers in humanoid robots to aim towards humanitarian activities, especially for disaster response.
The DARPA Robotics Challenge was launched with this background. The participant robots are required to complete tasks like vehicle driving, opening a door, rotating a valve, using a tool, go over a rough terrain, climb stairs, etc., within a limited time. The aforementioned features 2 and 3 are very relevant to the tasks requested in DRC. As a result, remarkable progress has been made in short time. This can be attributed to the effect of competition that mobilizes a huge mass of people in addition to distribution of common platforms as mentioned earlier, this time the hydraulically actuated the Atlas humanoid robot. Even with the shock coming from inadequacy of humanoid for actual disasters, the DRC drew public attention and triggered active and intensive humanoid research again. The difference is that the research is being conducted worldwide whereas the humanoid research was limited in a few institutes after the appearance of P2 in the late 1990s and early 2000s.

Figure 4. Humanoid robots developed at the National Institute of Advanced Industrial Science and Technology (AIST) in Japan. From left to right: a) HRP-2, b) HRP-3, and c) Cybernetic Human HRP-4C. These robots are intended for uses related to the entertainment industry and their shape is more similar to ours. / AIST
Having an ultimate application for disaster response, an «industrial humanoid» in large-scale manufacturing is investigated more and more intensively in recent years as a closer application in categories 2 and 3. An exemplar case is airplane manufacturing, which is much less automated compared to automobile industry, as many of assembly processes are still done manually. Human workers are often needed to do tedious and repetitive tasks in confined environments, sometimes forcing very difficult postures, which may lead to serious physical disorders. Humanoid robots are expected to execute those jobs to relieve human workers from those «non-added value» tasks so that they can concentrate on more creative and intelligent tasks. Unlike disaster response, the advantage of this application is that we usually have the information of environment, for example, computer-aided design data of assembled airplane, allowing the humanoid to localize itself based on sensory information like vision. Recently the Airbus Group collaborated with CNRS and the National Institute of Advanced Industrial Science and Technology (AIST) to develop technologies enabling humanoid robots to execute nut fastening and test circuit-breakers (Bolotnikova, 2017; Pfeiffer, Escande, & Kheddar, 2017).
The basic technology allowing those complex tasks is multi-contact motion planning, which has been studied intensively in order to extend the field of activities (Borràs, Mandery, & Asfour, 2017). This technique enables a humanoid robot to move by supporting its body with multiple contacts in the environment, not only feet but also arms and other body parts, to overcome rough terrains, to climb a ladder or to go into narrow spaces. Once this contact sequence is planned, a whole-body controller takes care of trajectory generation and control for the humanoid to perform the planned path.
«The tragedy of Fukushima drove researchers in humanoid robots to aim towards humanitarian activities, especially for disaster response»
This area of applications is not limited to airplane but can be applied to shipyards, plant constructions and maintenance. Now that a number of platforms are being proposed by companies in the pursuit of human-size «industrial humanoid» platforms, we can expect humanoids will be utilized for realistic applications in near future along with progress of humanoid capabilities.
Upper-body mobile humanoids
While we have been concentrating on full-size biped type and their applications for task execution so far, humanoid robots have also been intensively used for research on human-robot interaction and cognitive robotics. For this purpose, a number of upper-body humanoids, usually equipped with wheeled mobile base, referred to as upper-body mobile humanoids in this article, has been developed, such as Robovie, ARMAR-III, PR-2 and Pepper.
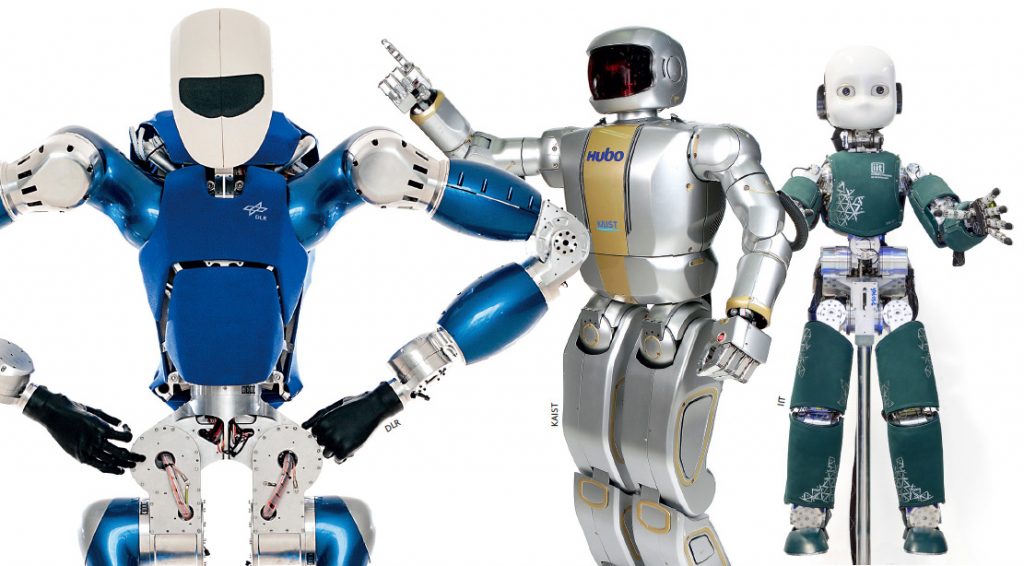
Figure 5. Below these lines, some examples of full-body humanoid robots developed through shared platforms since the mid-2000s. From left to right: a) torque controlled humanoid robot TORO, developed by the German Space Agency (DRL in its German initialism); b) Hubo, developed by the Korea Advanced Institute of Science and Technology (KAIST), and c) iCub, of the Italian Institute of Technology (IIT).
Upper-body mobile humanoids are useful for research on human-robot interaction because of their ability to adopt a wide range of behaviours combining trajectories of mobile base and upper-body motions. Takayuki Kanda and his team at the Advanced Telecommunications Research Institute (ATR) conducted a series of studies on how a humanoid robot can interact with and provide service to humans. The humanoid Robovie was introduced as a tutor for children to teach a foreign language (Kanda, Hirano, Eaton, & Ishiguro, 2004), as a guide in a museum that can reinforce the visitors’ experience (Shiomi, Kanda, Ishiguro, & Hagita, 2006), and as an affective guide in a shopping mall. They showed the possibility of using humanoids that can interact with humans proactively, by also using its cognitive capacity to guess users’ intentions with on board or environment sensors and also radio-frequency tags. Positive and promising results have been obtained in those experiments towards development of humanoid robots offering various services even in crowded space.
Professor Tanim Asfour and his team investigated cognitive and autonomous robotics based on the platform ARMAR-III, especially on human-robot interaction and autonomous object manipulation tasks in daily environments. ARMAR-III has a head, two redundant arms with seven degrees of freedom, each of which equipped with and eight degrees of freedom hand, linked to an omni-directional mobile base via a hip joint. Taking advantage of this high level of degrees of freedom, they demonstrated complex tasks such as arranging different dishes and cups in a dishwasher and fetching a designated object by using advanced techniques of motion and grasp planning (Asfour et al., 2008). Its head has audio and visual sensors (Asfour, Welke, Azad, Ude, & Dillman, 2008) in order to understand the user’s voice commands and to recognize and localize objects based on visual features and model-based 3D object matching.
«Humanoid robots have also been intensively used for research on human-robot interaction and cognitive robotics»
Dual-arm mobile platform PR-2 provided by Willow Garage has also been used for wide robotics research ranging from higher-level task planning, motion planning (Chitta, Cohen, & Likhachev, 2010), and object grasping (Van den Berg, Miller, Goldberg, & Abbeel, 2010). Recently released upper-body mobile humanoid Pepper (Figure 7) started being used also for human-robot interactions in education (Tanaka et al., 2015) and other applications such as receptionists or guides in different commercial or public facilities.
Finally, although not categorized as a mobile robot, I would like to mention dual-arm industrial robot Nextage by Kawada Robotics Corp. It is a dual-arm robot that is easily deployable and can operate in factories among humans to execute typically pick-and-place tasks in cell production systems for high-mix low-volume production. Its most outstanding feature is co-existence in human environment thanks to its low power and high capacity of task execution. It is one of the most representative applications of humanoid robots to industry and its know-how of deployment is expected to be extended to other domains like large-scale assembly, and plant maintenance, as mentioned earlier.
Summary and future directions
This article offers a brief overview of humanoid robots, from historical aspects, development of hardware and software, and its applications. As stated earlier, humanoid robotics is an active domain that is growing and making advances today. In spite of tremendous progress until recently, it has still room for further evolution. Robotics is already a research field requiring integration of different technologies such as perception, intelligence and motion generation, and I would like to emphasize that humanoids are the most demanding among robots due to its complexity.

Figure 6. Humanoids can be used to evaluate wearable devices, preventing some of the problems of experimenting on humans, such as the quantitative evaluation of supportive effect as opposed to using subjective questionnaires. In the pictures, evaluation of the pneumatically powered assistive device «muscle suit», which allows a human worker to lift and carry weights greater than they would otherwise be able to, by the humanoid HRP-4. / Ito et al., 2017
For humanoid robots to do useful tasks, it is necessary to incorporate most of perceptual technologies: recognition of environments using visual, depth, auditory signal and also with tactile and force information. Especially the last one is currently requiring the most improvements for future development of humanoids. Physical interaction with environments are the most lacking capacity for current humanoid robots. Although efforts are intensively being made, present humanoid robots are still rigid and insensitive far from the fine and compliant physical interactions that humans can perform. This is also closely related to evolution of actuation technology. New compliant actuators that have equivalent efficiency and capacity to our muscles and can completely replace the combination of electric motors and mechanical gears that are commonly used for humanoids. Such «rigid» humanoid robots currently available are vulnerable to damages especially when they fall and may also cause serious problems if they hit humans. Robustness in hardware and control is therefore essential. Soft robotics has been attracting attention for decades and we can expect breakthroughs via interdisciplinary research also involving material and biological science. Of course, control technique should also be investigated to exploit the progress in perception and actuation. These developing technologies are altogether the key issues towards high-performance industrial humanoid robots mentioned earlier that can execute dexterous tasks in an autonomous way, collaborating with human workers when necessary.
«Recent remarkable advancements in artificial intelligence, especially in machine learning, can naturally go very well with humanoids»
Last but not least, the intelligence to cope with humanoids’ complex physical embodiment and environment is of course indispensable. In this article, we focus on humanoid research, but recent remarkable advancements in artificial intelligence, especially in machine learning, can naturally go very well with humanoids. Advanced intelligence is necessary everywhere they go: understanding and reasoning their surroundings, making decisions to accomplish required tasks, and interacting with humans and the environments in an adaptive manner, extending the human-robot interaction and cognitive technologies. Synergetic interdisciplinary research is required more than ever in order to push forward the humanoid technology towards its applications in the real world, so that they can be integrated as the best partner of humans in near future.
1 An actuated robot is moved through the action of actuators; that is, devices that transform a signal (usually an electric signal in these cases) into a movement made by the robot. (Go back)
REFERENCES
Asfour, T., Azad, P., Vahrenkamp, N., Regenstein, K., Bierbaum, A., Welke, K., & Dillmann, R. (2008). Toward humanoid manipulation in human-centred environments. Robotics and Autonomous Systems, 56(1), 54–65. doi: 10.1016/j.robot.2007.09.013
Asfour, T., Welke, K., Azad, P., Ude, A., & Dillmann, R. (2008). The Karlsruhe humanoid head. In 2008 8th IEEE-RAS International Conference on Humanoid Robots, (pp. 447–453), Daejeon, South Korea: IEEE. doi: 10.1109/ICHR.2008.4755993
Ayusawa, K., & Yoshida, E. (2017). Motion retargeting for humanoid robots based on simultaneous morphing parameter identification and motion optimization. IEEE Transactions on Robotics, 33(6), 1343–1357. doi: 10.1109/TRO.2017.2752711
Bolotnikova, A., Chappellet, K., Paolillo, A., Escande, A., Anbarjafari, G., Suarez-Roos, A., ... Kheddar, A. (2017). A circuit-breaker use-case operated by a humanoid in aircraft manufacturing. In 2017 13th IEEE Conference on Automation Science and Engineering, (pp. 15–22), Xi’an, China: IEEE. doi: 10.1109/COASE.2017.8256069
Borràs, J., Mandery, C., & Asfour, T. (2017). A whole-body support pose taxonomy for multi-contact humanoid robot motions. Science Robotics, 2(13), eaaq0560. doi: 10.1126/scirobotics.aaq0560
Calinon, S., D’halluin, F., Sauser, E. L., Caldwell, D. G., & Billard, A. (2010). Learning and reproduction of gestures by imitation. IEEE Robotics & Automation Magazine, 17(2), 44–54. doi: 10.1109/MRA.2010.936947
Chitta, S., Cohen, B., & Likhachev, M. (2010). Planning for autonomous door opening with a mobile manipulator. In 2010 IEEE International Conference on Robotics and Automation (pp. 1799–1806), Anchorage, USA: IEEE. doi: 10.1109/ROBOT.2010.5509475
Goswami, A., & Vadakkepat, P. (Eds.). (2019). Humanoid robotics: A reference. Dordrecht: Springer.
Ito, T., Ayusawa, K., Yoshida, E., & Kobayashi, H. (2017). Human motion reproduction by torque-based humanoid tracking control for active assistive device evaluation. In 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (pp. 503–508), Birmingham, UK: IEEE. doi: 10.1109/HUMANOIDS.2017.8246919
Kajita, S., Hirukawa, H., Harada, K., & Yokoi, K. (2014). Introduction to humanoid robotics. Berlin: Springer. doi: 10.1007/978-3-642-54536-8
Kajita, S., Kanehiro, F., Kaneko, K., Fujiwara, K., Harada, K., Yokoi, K., & Hirukawa, H. (2003). Biped walking pattern generation by using preview control of zero-moment point. In 2003 IEEE International Conference on Robotics and Automation (pp. 1620–1626), Taipei, Taiwan: IEEE. doi: 10.1109/ROBOT.2003.1241826
Kanda, T., Hirano, T., Eaton, D., & Ishiguro, H. (2004). Interactive robots as social partners and peer tutors for children: A field trial. Human-Computer Interaction, 19(1), 61–64. doi: 10.1207/s15327051hci1901&2_4
Kaneko, K., Kanehiro, F., Morisawa, M., Miura, K., Nakaoka, S., & Yokoi, K. (2009). Cybernetic Human HRP-4C. In 2009 9th IEEE-RAS International Conference on Humanoid Robots (pp. 7–14), Paris, France: IEEE. doi: 10.1109/ICHR.2009.5379537
Kato, I., Ohteru, S., Kobayashi, H., Shirai, K., & Uchiyama, A. (1973). Information-power machine with senses and limbs. In P. Serafini, E. Guazzelli, B. Schrefler, F. Pfeiffer, & F. Rammerstorfer (Eds.), On theory and practice of robots and manipulators. Vol. I (pp. 11–24). Vienna: Springer. doi: 10.1007/978-3-7091-2993-7
Kobayashi, H., Aida, T., & Hashimoto, T. (2009). Muscle suit development and factory application. International Journal of Automation Technology, 3(6), 709–715. doi: 10.20965/ijat.2009.p0709
Miura, K., Yoshida, E., Kobayashi, Y., Endo, Y., Kanehiro, F., Homma, K., … Tanaka, T. (2013). Humanoid robot as an evaluator of assistive devices. In 2013 IEEE International Conference on Robotics and Automation (pp. 679–685), Karlsruhe, Germany: IEEE. doi: 10.1109/ICRA.2013.6630646
Nakaoka, S., Nakazawa, A., Kanehiro, F., Kaneko, K., Morisawa, M., & Ikeuchi, K. (2005). Task model of lower body motion for a biped humanoid robot to imitate human dances. In 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3157–3162), Edmonton, Canada: IEEE. doi: 10.1109/IROS.2005.1545395
Pfeiffer, K., Escande, A., & Kheddar, A. (2017). Nut fastening with a humanoid robot. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 6142–6148), Vancouver, Canada: IEEE. doi: 10.1109/IROS.2017.8206515
Shiomi, M., Kanda, T., Ishiguro, H., & Hagita, N. (2006). Interactive humanoid robots for a science museum. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, (pp. 305–312). New York: Association for Computing Machinery. doi: 10.1145/1121241.1121293
Tanaka, F., Isshiki, K., Takahashi, F., Uekusa, M., Sei, R., & Hayashi, K. (2015). Pepper learns together with children: Development of an educational application. In 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids) (pp. 270–275), Seoul, South Korea: IEEE. doi: 10.1109/HUMANOIDS.2015.7363546
Van den Berg, J., Miller, S., Goldberg, K., & Abbeel, P. (2010). Gravity-based robotic cloth folding. In D. Hsu, V. Islker, J.-C. Latombe, & M. C. Lin (Eds.), Algorithmic Foundations of Robotics IX (pp. 409–424), Berlin-Heidelberg: Springer. doi: 10.1007/978-3-642-17452-0_24
Vukobratovic, M., & Borovac, B. (2004). Zero-moment point. Thirty-five years of its life. International Journal of Humanoid Robotics, 1(1), 157–173. doi: 10.1142/S0219843604000083
Wieber, P. B. (2008). Viability and predictive control for safe locomotion. In 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 1103–1108), Nice, France: IEEE. doi: 10.1109/IROS.2008.4651022
Yoshida, E., Laumond, J.-P., Esteves, C., Kanoun, O., Mallet, A., Sakaguchi, T., & Yokoi, K. (2009). Motion autonomy for humanoids: Experiments on HRP-2 No. 14. Computer Animation and Virtual Worlds, 20 (5–6), 511–522. doi: 10.1002/cav.280